Integrazione con sensori¶
Il sistema MS1-net può essere impiegato come integrazione attiva con altra sensoristica. Di seguito un esempio degli utilizzi che sono stati eseguiti integrando il sistema con:
- Georadar
- Ecoscandagli (batimetrie)
- Robot per movimenti di precisione
Nei casi sopra citati si utilizza il dispositivo in RTK, in tal modo vengono spedite le stringhe nmea di posizione tramite la seriale posteriore a strumenti esterni (georadar o ecoscandaglio) che necessitano della posizione precisa ogni secondo (PPS).
Nota
È possibile inoltre:
- registrare le stringhe NMEA all’interno del dispositivo per essere poi scaricate per mezzo di una semplice pagina web disponibile con il dispositivo acceso
- inoltrarele ad un database remoto di Postgresql/PostGIS
- inoltrarle via TCP/IP
- registrare il dato grezzo proprietario (indistintamente se il sensore è fermo in in movimento)
Qui sotto viene illustrata l’integrazione del dispositivo a bordo di un georadar per migliorare la precisione della posizione in RTK. Il dispositivo può condividere le stringhe NMEA in tempo reale (GNGGA ecc…) con il device Android. Quest’ultimo è collegato via Bluetooth (porta COM Serial Port Profile) con il georadar e gestito dal software proprietario.

Fig.1 Esempio di integrazione con un georadar
Qui sotto invece viene illustrata l’integrazione del dispositivo per ispezioni di precisione con ROV (veicolo subacqueo) che arriva fino a 600mt di profondità. in questo caso il dispositivo viene alloggiato nella sala comando dell’imbarcazione dove sono installati tutti i sistemi di navigazione.
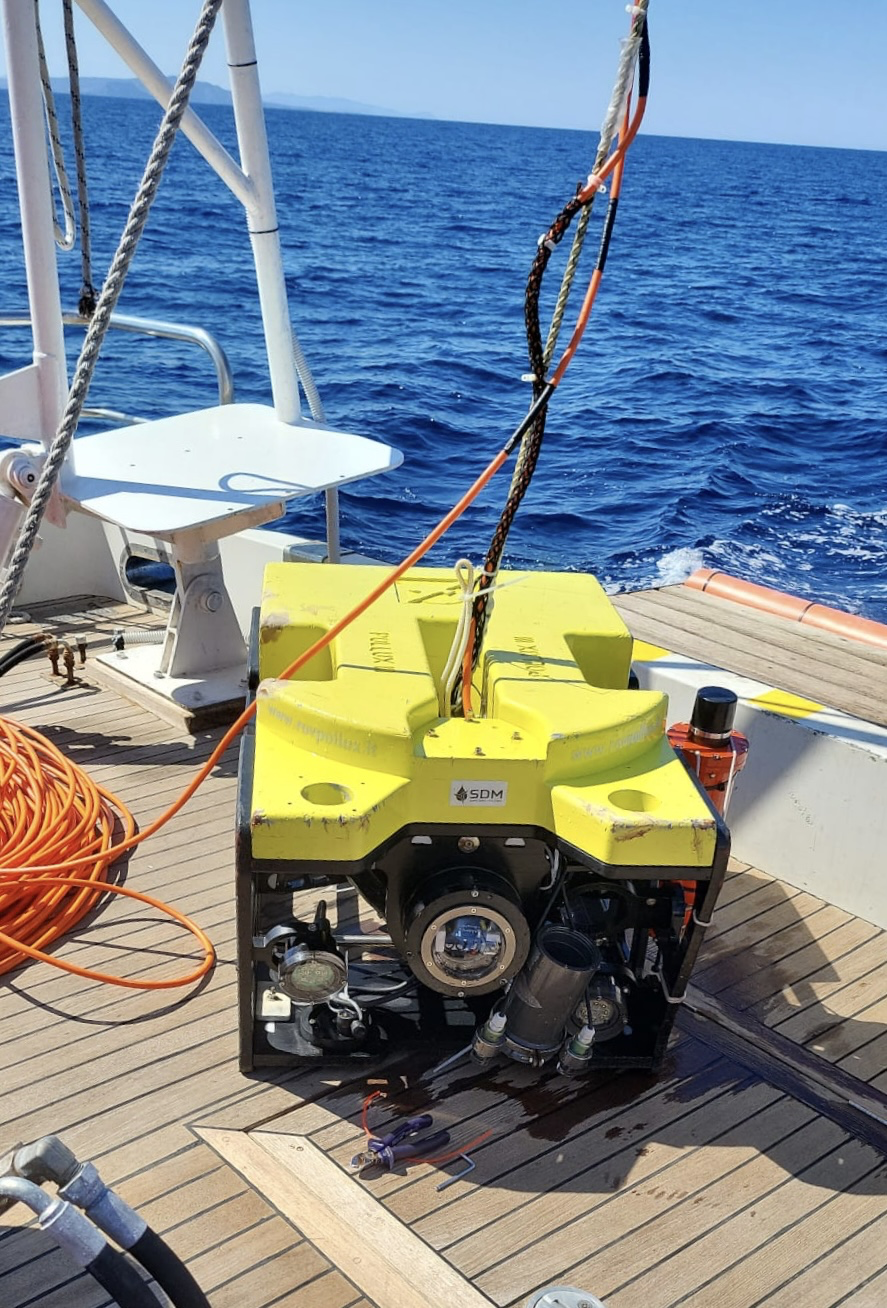
Fig.2 Ispezioni con ROV (veicolo subacqueo)